
[첨단 헬로티] 유제품 포장 디자인은 다양성, 일회사용, 사용 편리성 등과 같은 소비자 요구를 충족하기 위해 변하고 있다. 브랜드들은 특정 마케팅 정보 인쇄를 위해 인쇄 유연성을 원한다. 따라서 제품 전환 주기 증가, 작은 공간에 가독성 있는 코드 인쇄, 생산 효율성 및 가동시간 향상과 같은 생산 관련 과제로 이어진다. 인쇄 공정에서 유연성과 정확성을 높이는 가장 좋은 방법은 무엇일까? 유연한 유제품 포장 적용분야에서 적합한 기술인 열전사 프린터(TTO)의 선도업체인 Videojet의 고해상도 TTO 프린터는 유연한 재질에 텍스트, 바코드, 로고 등의 고품질 인쇄가 가능하다. 터치스크린 사용자 인터페이스, 편리한 정보 선택 기능, 긴 리본 교체 주기 등 Videojet의 TTO 프린터는 인쇄 정확성 및 가동시간 향상을 보장할 수 있다. 좁은 인쇄영역에 선명하고 읽기쉬운 코드를 인쇄 제품 변경 및 일회용 용기 크기가 다양해지면서 유효기간 및 생산 코드 인쇄를 위한 공간도 작아지고 있다. 여기다 유제품에 필요한 코드 정보의 양도 증가하여 어려움이 더해졌다. 과거에 유제품 산업에서 사용하던 방법은 인쇄 크기와 품질 면에서 제약이 있다. 핫 스탬프 또는 롤러 코더

[첨단 헬로티] 하야시 유스케(林 勇介), 모리타 카즈나리(森田 一成) 三菱電機(주) 1. 서론 최근에는 제품의 경량화나 소형화와 함께 플라스틱 성형품의 보강용 리브의 박형화가 추진되고 있다. 또한 LED 냉각용 히트싱크의 소형화 또는 냉각 효율 향상을 목적으로 히트싱크 금형에서도 홈 폭의 박형화와 심구화가 추진되고 있다. 이들 금형은 형조 방전가공기에 의해 제작되는 경우가 많다. 2. 형조 방전가공기의 박형 리브가공의 과제 형조 방전가공기의 박형 리브가공에서 플라스틱 금형의 이형성과 질감을 향상시키기 위한 면조도 균일성 향상과 생산성 향상을 목적으로 한 가공 시간 단축과 기계 가동률 향상이 요구되고 있다. 그리고 금형 제작의 코스트 절감을 목적으로 전극 소모량 절감에 의한 전극 개수 삭감의 요구도 받고 있다. 형조 방전가공으로 하는 박형 리브 전극가공의 경우, 가공 중의 점프다운 동작이나 요동 시에 전극이 받은 액저항에 의해 박형 리브와 같은 강성이 약한 전극의 경우는 전극에 흔들림이나 휨이 발생한다. 그렇기 때문에 가공 중의 전극와 워크의 극간 거리가 안정되지 않고, 가공 서보가 불안정해져 즉시 방전이나 집중 방전의 발생 빈도가 높아진다. 이들 요인에 의

[첨단 헬로티] 보안 기업 소닉월이 2월 13일, 연간 사이버 위협 보고서를 발표하고 특정 기업 및 소비자들을 타깃으로 하는 탐지 회피 기법의 사이버 공격이 늘어났다고 밝혔다. 2020 소닉월 사이버 위협 보고서 주요 내용 ① 사이버 범죄자의 멀웨어 접근 방법 변화 : 과거 멀웨어 공격의 높은 비중을 차지했던 ‘무작위’ 전술의 빈도가 하락했다. 약한 피해자들을 겨냥하여 더 타깃화 되고 회피할 수 있는 기술이 늘어나고 있기 때문이다. 소닉월 조사 결과 99억 건의 공격이 발견됐으며, 이는 전년대비 6% 하락한 수치이다. ② 타깃형 랜섬웨어 공격 : 랜섬웨어의 총 발생 건(1억8790만 건)은 2019년 9% 감소했으며, 이로 인해 여러 공공기관이 마비되고, 이메일, 웹 사이트, 전화 및 디스패치 서비스까지도 심각한 피해를 입은 것으로 나타났다. ③ 사물 인터넷(IoT) : 범죄자들은 지속적으로 스마트 TV, 전동 스쿠터, 스마트 스피커 등의 기기는 물론 칫솔, 냉장고, 초인종과 같은 생활 필수 기능에 랜섬웨어를 배포하고 있다. 2019년 소닉월 캡처 랩에 따르면, IoT 멀웨어 공격이 5%가 증가한 3430

[첨단 헬로티] 사토 신이치로(佐藤 愼一郞), 아마노 토모코(天野 友子) SEAVAC(주) 1. 서론 자동차의 경량화와 안전성을 높이기 위해 구조 부품의 고강도화가 추진되고 있으며, 강 재료로서 고장력강이 적극적으로 이용되어 왔다. 이와 함께 가공하는 프레스 금형도 고내구성을 요구받고 있으며, PVD 코팅을 비롯한 표면처리는 보다 높은 막경도, 내열성과 이들을 발휘하기 위한 밀착성을 요구받고 있다. ZERO-Ⅰ(제로원) 코팅은 경도, 내열성을 높인 PVD 코팅으로, 금형의 안정 장수명화에 의해 메인티넌스 빈도를 줄이고 금형가공의 코스트 절감에 공헌해 왔다. 고장력강의 프레스 성형은 보다 고온에서 가공을 하는 핫스탬핑 기술의 적용이 확대되고 있으며, 피복 금형의 고온 상태의 거동을 검증하는 것이 필요하다. 이 글에서는 고온 상태의 피막 상태를 확인하고, ZERO-Ⅰ 막의 내산화성, 고온내마모성의 평가를 했다. 2. 실험 방법 피막의 내산화성을 조사하기 위해 대기산화시험을 했다. ZERO-Ⅰ, TiAlN을 코팅한 SKD11재를 光洋서모시스템제 전기로로 대기 중에서 900℃, 1,000℃로 60분 가열하고, 주사형 전자현미경(SEM)으로 표면, 칼로테스트(Calo

[첨단 헬로티] 카와타 카즈키(河田 一喜), 키다치 토루(木立 徹) 오리엔탈엔지니어링(주) 1. 서론 프레스, 단조로 대표되는 냉간가공용 금형에 요구되는 성능으로서는 내마모성, 내스커핑성, 내버닝성 등이 있다. 이들의 요구 성능에 대해 각종 표면처리가 냉간가공용 금형에 적용되고 있다. 그 중에서 TRD(Thermo Reactive Deposition and Diffusion)법, CVD(Chemical Vapor Deposition)법, PVD(Physical Vapor Deposition)법으로 대표되는 세라믹 코팅은 내마모성, 내버닝성이 우수하기 때문에 널리 응용되고 있다. 단 TRD법(TD법)이나 CVD법은 처리 온도가 약 1,000℃로 높기 때문에 금형의 변형, 치수 변화가 생기기 쉽다. 또한 PVD법은 저온 처리이기 때문에 변형, 치수 변화는 적지만, 그 프로세스 원리에서 막의 균일전착성이 나쁘기 때문에 깊은 구멍의 다이나 복잡한 형상의 금형에 대한 적용에는 제한이 있다. 또한 PVD법 중에서도 다용되고 있는 아크법은 매크로파티클(Macroparticles)이나 핀홀(Pits)이 막 표면에 생성되기 때문에 윤활성, 내스커핑성 등에 문제가 있다. 그래

[첨단 헬로티] 와타나베 요시노부 (渡邉 芳修), 미즈타니 와타루 (水谷 亘) ㈜소딕 1. 서론 고정도, 고품위의 금형가공에서 NC 장치의 고속․고정도 윤곽 제어는 없앨 수 없는 기능인데, 최적의 파라미터 선택과 주축 회전수, 절삭 이송 속도 등의 가공 조건을 결정하기 위해서는 테스트 가공이 필요하며, 리드 타임 증가, 코스트 증가의 원인이 되고 있다. 또한 미세 정밀가공이나 복잡 형상의 가공에서는 실제 절삭 이송 속도(F값)이 지령 절삭 이송 속도에 도달해 가공하고 있는 것은 드물며, 그것을 하회해 가공되고 있는 것이 많이 있다. 그렇기 때문에 1날당 절삭량으로 판단한 가공 조건이 무너져 버리고 결과적으로 공구 마모를 촉진시키는 원인이 되며, 또한 절삭 이송 속도의 큰 편차로부터 가공 면질이 손상되어 버리는 경우가 있다. 그래서 동사에서는 앞에서 서술한 문제를 해결하고, 가공 조건 결정의 작업량을 삭감하기 위한 어시스트 툴로서 최적의 ‘절삭 이송 속도’와 ‘고속․고정도 윤곽 제어의 파라미터’를 산출하는 소프트웨어 ‘EF-Tune’를 개발했다. 이 글에서는 EF

[첨단 헬로티] 가오 펭 (高 峰) 서일본공업대학 1. 서론 절삭가공이나 연삭가공 등의 기계가공을 할 때에 바이스로 피가공 재료를 고정할 필요가 있다. 1개씩 가공하는 것보다 여러 개의 워크(중간 가공품과 초기 상태의 재료를 포함)를 동시에 바이스로 고정, 1회의 가공을 하는 것은 효율적이다. 한편 보통의 바이스를 사용하는 경우, 여러 개의 워크를 동시 고정하는 것은 고체 간의 작은 치수차에 의한 체결력의 편차가 발생해 불량품의 발생이나 가공 중에 워크 어긋남의 위험을 초래할 가능성이 있다. 이 문제를 해결하기 위해 이번 개발은 여러 개의 동일 규격의 워크를 1개의 바이스로 고정해 가공할 때에 작은 치수의 차이를 흡수하는 플로팅 바이스의 구조를 제안했다. 이 글에서는 그 구조와 동작 원리를 해설하고, 시제작품을 이용한 동작 확인과 평가의 평가를 보고한다. 2. 보통의 바이스로 고정하는 체결 방법과 문제점 (1) 보통 바이스의 체결 방법 밀링이나 머시닝센터, 연마기 등의 가공기를 이용해 부품을 가공할 때에 워크의 고정에는 끼우기 턱이 있는 지그인 바이스를 사용한다. 보통의 시판 바이스의 구조는 대부분 나사식으로, 회전운동을 직선 이동으로 변환해 평행하는 2개의

[첨단 헬로티] 오츠키 토시아키 (大槻 俊明), 사사하라 히로유키 (笹原 弘之) 東京農工대학 사토 류타 (佐藤 隆太) 神戶대학 1. 서론 5축가공기를 포함해 CNC(수치제어) 공작기계의 중요한 운동 성능은 공작물을 원하는 정도 내로 가급적 단시간에 가공하는 고속․고정도성이다. 일반적으로 속도와 정도는 트레이드 오프의 관계에 있는 것이 알려져 있다. 즉, 오차를 작게 하기 위해서는 속도를 줄여야 하며, 속도를 높이면 오차가 커진다. 그렇기 때문에 고속․고정도성을 평가하기 위해서는 속도와 정도를 동시에 평가할 필요가 있다. 직교 2직진축에 대해서는 그 고속․고정도성을 속도와 오차의 2차원으로 평가하는 방법이 있다. 이 글에서는 회전축과 직진축에 의한 원통면과 그 전개면을 도입, 전개면 상에서 회전축과 직진축의 지령 궤적을 지령해 모터 인코더 위치를 전개면에 전사함으로써 실제 궤적을 얻고, 오차를 지령 궤적과 실제 궤적의 차이로서 얻는다. 그리고 회전축과 직진축의 윤곽 운동에서 고속․고정도성을 속도와 오차의 2차원으로 평가한다. 2. 원통면의 도입과 속도․오차 2차원 표시 (1) 회전축과 직진축에 의한 전개면의

[첨단 헬로티] 나카무라 신고 (中村 眞吾) 三菱重工工作機械(주) 1. 서론 작업자 부족이 심각화되고 있는 가운데, 금형에 대한 요구는 점점 더 높아지고 있다. 기존의 대형 가공기에 의한 금형 제작은 작업자의 테크닉이 필요하며, 기계 다듬질가공 후의 수작업 수정이 있었기 때문에 자동화를 위한 과제 해결이 어려운 상황이었다. 단순히 무인운전할 수 있는 것도 자동화라고 할 수 있지만, 작업자가 기계가공 전후 혹은 도중에 개입해 조정이나 재가공을 하지 않고 안정된 고품질의 금형가공을 실현하는 것을 지향할 필요가 있다. 동사 제품인 대형 고정도 가공기 ‘MVR․Fx’는 제로에 대한 도전을 콘셉트로 고정도․고품위 가공이 가능하도록 만들어져 있다. 이 기계의 기능을 중심으로, 금형가공의 자동화를 위한 가공기 성능과 측정 기술의 진화에 대해 소개한다. 2. 기계의 신뢰성․재현성 금형가공의 자동화에는 기계의 기본 성능을 향상시켜 고정도화시키는 것이 전제 조건이 된다. 몇 번 가공해도 동일한 결과를 얻을 수 있는 신뢰성․재현성이 없으면, 후술할 기술의 성능을 발휘할 수 없기 때문에 동 기계의 구조는 모두를 수정

[첨단 헬로티] 호리에 토시하루 (堀江 利治) 新日本工機(주) 1. 서론 최근의 금형가공에서 고속․고정도․고품위 등의 요구는 계속 높아지고 있다. 이 글에서는 이러한 요구를 반영해 보정 없이 트라이 한 번으로 금형을 제작하기 위해 정도, 면품위, 가공 시간 단축의 3요소를 고차원으로 양립시키는 것을 목적으로 하는 대응을 소개한다. 2. 금형가공기 기술 금형의 고속․고정도․고품위를 달성하기 위해서는 기계와 제어의 요소가 높은 수준으로 밸런스가 잡혀 있어야 한다. 우선 기계는 고속의 가속도에서도 고정도를 유지하는 강성, 그리고 장시간의 무인가동을 실현하는 안정성이 필요하다. 제어에 있어서는 디자인을 충실하게 재현하는 가공 패스와 최속 가공을 실현하는 속도 제어가 필요하다(그림 1). (1) X축 리니어모터 구동을 채용 기존 동사에서는 대경 볼나사를 채용, 금형 중량에 대응한 X축의 가감속 설정과 최적의 파라미터 설정을 하는 방법에 의해 고속․고정도․고품위 가공을 실현해 왔다. 그러나 특히 금형 중량이 큰 경우나 X축 스트로크가 긴 경우에는 각 축의 동기를 유지할 필요성에서 X축의 영향(볼나사의 비틀

[첨단 헬로티] AI 반도체 전문 기업인 그래프코어(Graphcore)가 본격적으로 한국 시장에 진출한다. 그래프코어의 AI 반도체 ‘콜로서스(Colossus) IPU(지능 처리 장치:Intelligence Processing Unit)’는 프로세서에 직접 메모리를 배치해 연산 속도를 빠르게 개선시킨 점을 내세우고 있다. 그래프코어는 한국 시장에서 금융, 헬스케어, 검색엔진 등의 시장을 공략한다는 계획이다. 그래프코어는 지난 2016년 영국 브리스톨에서 나이젤 툰(Nigel Toon) 최고경영자(CEO)와 사이먼 놀스(Simon Knowles) 최고기술책임자(CTO)가 AI 시대와 머신러닝에 특화한 반도체의 필요성에 주목해 공동으로 창업한 기업이다. 그래프코어는 올해 1월 한국에 지사를 설립했고, 한국 지사장으로 강민우 루브릭 전 한국 지사장을 그래프코어 한국 지사장으로 선임했다. 강민우 지사장은 일본과 중국을 제외한 아시아 지역을 총괄할 계획이다. 참고로 그래프코어는 일본에도 지사를 지난 1월에 설립했다. 이와 관련해 그래프코어는 2월 4일 그랜드 인터컨티넨탈 서울 파르나스에서 기자 간담회를 개최하고, 콜러서스 IPU 소개와 함께 한국

[첨단 헬로티] 왜 그런지 잘 모르겠지만, 액추에이터 개발의 역사에는 부활극이 많다. 한 번 ‘부적합 낙인’이 찍힌 액추에이터가 시간이 지나면서 주변 기술의 발전과 사회 요구의 변화에 따라 부활한다. 예를 들면 정전 액추에이터는 힘이 너무 작아 오랫동안 내버려져 있었는데, 1980년대 후반 MEMS 기술의 전개와 함께 마이크로 영역에서 유용성이 평가되어 일약 실용 액추에이터의 하나로 도약하게 된다. 전기자동차의 역사는 오래됐지만, 오랫동안 거의 실용화되지 못했다. 그러나 전지 기술의 발달과 지속적인 사회를 목표로 하는 요구로 인해 최근 크게 부활하고 있다. 유압 액추에이터는 1990년 지나서는 로보틱스 세계에서 대부분 모습을 감추었는데, 최근 보스턴다이내믹스사의 훌륭한 로봇들과 원격시공 건설기계의 요구로 다시 주목받고 있다. 히구치 토시로우 박사(도쿄대학 명예교수)는 이 부활극에 대해 ‘온고지신(溫故知新)’이라는 말을 사용하고 있다. 오래된 기술에 생각하지 못했던 힌트가 숨겨져 있는 경우가 있고, 새롭다고 생각해도 실제로는 이미 연구되어 있는 경우도 많으므로 연구를 시작하기 전에 과거의 연구를 잘 조사해 보라고 하는

[첨단 헬로티] Society 5.0으로 실현하는 초스마트 사회에서는 많은 수의 센서와 액추에이터, 프로세서가 환경 속에 설치되어 있으며, 그들의 에지 노드(네트워크 단말 디바이스)가 네트워크를 구성해 연계함으로써 여러 가지 기능․서비스가 제공된다. 여러 개의 에지 노드 모두에 전원 공급이 필요하지만, 전원 배선 공사와 정기적인 전지 교환을 하는 것이 기술적 혹은 경제적으로 어려운 케이스도 많이 예상된다. 그렇기 때문에 에지 노드에 대한 전원 공급이 Society 5.0 실현의 장해물이 될 가능성이 있다. 그러한 배경에서 새로운 전원 공급 기술로서 주목받고 있는 것이 에너지 하베스팅이다. 우리들 주변 환경 속에는 빛․열․진동․전파 등 여러 가지 형태로 에너지가 존재한다. 에너지 하베스팅 기술은 이러한 에너지를 수확(하베스트)해, 전기 에너지로 변환하는 기술이다. 이 글에서는 에너지 하베스팅 기술의 개발․실용화 동향과 IoT․AI에 대한 활용 사례를 소개하고, Society 5.0 실현을 위한 전망을 살펴본다. 에너지 하베스팅 기술의 개발․실용화 동향 앞에서 말했듯이 에너지 하베스팅 기
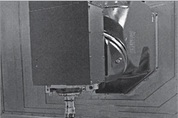
[첨단 헬로티] 5축 공작기계에 대해 터치프로브와 기준구를 사용해 선회 2축의 기하학적인 오차를 동정(identification), 보정을 하는 시스템을 각사가 상품화하고 있다. 그림 1은 DMG모리세이키의 ‘3D 퀵세트(quickSET )’ 사진인데, 동일한 시스템은 이외에도 많은 메이커에서 판매되고 있다. 측정 순서나 동정할 수 있는 오차 파라미터의 범위에 차이는 있지만, 기본적인 개념에 큰 차이는 없다. 그림 1. 터치프로브와 기준구를 사용한 5축 공작기계의 캘리브레이션 시스템의 예 (DMG모리세이키 ‘3D 퀵세트’) 오퍼레이터가 기준구를 테이블 상에 고정하고 대략적인 위치를 입력하면, 공작기계가 자동적으로 선회 2축을 여러 가지 각도로 산출, 터치프로브로 기준구의 위치를 측정한다. 5축기구에서는 선회축의 위치 오차(CNC 시스템에 기억된 회전 중심의 위치와 실제 위치의 오차)나 직진축과 선회축의 직각도 오차 등 기계 조립 오차가 주요한 오차 요인이 된다(축 평균선의 기하 오차 혹은 단순히 기하 오차라고 부르는 경우가 많다). 기준구 위치의 측정 결과로부터 이들 오차를 동정, 보정한다. 선회축의 위치 오차는 C

[첨단 헬로티] 필자가 뱀 로봇의 연구를 시작한 것은 1971년에 도쿄공업대학의 제어공학 전공 석사 과정에 입학했을 때부터이다. 대학(요코하마국립대학)에서는 기계공학을 공부했고, 졸업 연구는 그즈음 조교수였던 토도 이사오 선생의 밑에서 신뢰성공학의 최적화 문제를 연구했다. 대학 분쟁의 영향으로 연구 기간은 반년 정도로 짧았지만, 해외 논문에 실린 동적계획법으로 푼 신뢰성의 최적화 문제를 독자의 계산 알고리즘을 생각해 계산한 결과, 보다 정도가 좋은 해답을 유도할 수 있다는 것을 발견해 졸업 논문을 쓰기도 했다. 단, 이 방법은 나중에 최급강하법의 일종이라는 것을 알았기 때문에 대단한 연구는 아니었다. 이러한 해석적인 연구도 좋지만, 대학원에서는 뭔가 전혀 새로운 것을 만들 수 있는 연구를 하고 싶다고 생각했다. 마침 그즈음 도쿄공업대학 교수인 모리 마사히로 선생 등의 ‘로봇-그 기술과 미래’(NHK출판)을 읽었는데, 그 안에 나와 있는 ‘부드러운 기계’라고 하는 개념이 재밌다고 생각했다. 기존 기계의 개념과는 다르게 움직임의 정확성도 스피드도 없는 흐늘흐늘한 기계가 좋다는 이야기였다. 그래서 대학원은 도쿄공업대학에





















상호명(명칭) : (주)첨단 | 등록번호 : 서울,자00420 | 등록일자 : 2013년05월15일 | 제호 :헬로티(helloT) | 발행인 : 이종춘 | 편집인 : 김진희 |
본점 : 서울시 마포구 양화로 127, 3층, 지점 : 경기도 파주시 심학산로 10, 3층 | 발행일자 : 2012년 4월1일 | 청소년보호책임자 : 김유활 | 대표이사 : 이준원 | 사업자등록번호 : 118-81-03520 | 전화 : 02-3142-4151 | 팩스 : 02-338-3453 | 통신판매번호 : 제 2013-서울마포-1032호
copyright(c) HelloT all right reserved
UPDATE: 2025년 01월 13일 15시 17분














