
"물체 강성에 맞춰 잡는 힘 조절 혁신적 신기술" 국내 연구진이 물체 강성에 맞춰 잡는 힘을 조절할 수 있는 지능형 로봇 손 기술을 개발했다. 한국전자통신연구원(ETRI)은 지능형 부품 센서연구실이 360도 전방위 압력을 정밀하게 감지할 수 있는 로봇 손가락 촉각센서 신기술을 개발했다고 26일 밝혔다. 사람 손가락 같은 강성(모듈러스)과 형상을 갖고 있어 단단한 물체부터 변형가능한 부드러운 물체까지 모두 유연하게 다룰 수 있는, 로봇 촉각 기능을 한 단계 끌어올린 혁신적 기술로 평가된다. 연구진은 기존 3D 형상의 로봇 손가락에 적용되는 압력센서가 물체를 잡는 방향에 따라 왜곡된 신호를 보였던 기술적 한계를 극복했다고 설명했다. 이 기술을 통해 로봇이 다양한 물체를 더 정밀하게 조작하고 인간과의 상호작용을 크게 개선할 수 있을 것으로 기대된다. 연구진은 센서의 정밀 압력 감지 능력에 더해 로봇 손가락의 압력 변화에 따라 LED 색상이 변하도록 해 사용자에게 직관적인 피드백을 제공하게 했다. 지능형 부품 센서연구실 김혜진 책임연구원은 "이번 전방위 촉각센서가 내장된 로봇 손가락 개발로 로봇이 제조, 서비스 분야 등 다양한 분야에서 더욱 복잡하고 섬세한 작업을
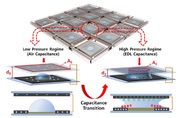
[첨단 헬로티] 건국대학교 공과대학 화학공학부 이위형 교수팀은 한양대학교 화학공학과 김도환 교수팀과 공동으로 액체 방울이 붙고 떨어지는 현상을 이용한 초민감 투명 그래핀 촉각센서를 개발했다고 밝혔다. ▲이번 연구에서 제안된 촉각센서 매커니즘, 그래핀 그리드 위에고정화된 이온성액체가 상부그래핀 전극에 접촉함에 따라 정전용량이 변화하는 것으로부터 압력을 센싱하는 모식도 건국대 이위형 교수(교신저자)와 유기나노시스템공학과 이승철연구원(제1저자, 석사과정 졸업, LG디스플레이 연구원), 한양대 김주성 박사과정 학생(제1저자), 김도환 교수(교신저자) 공동연구팀의 이번 연구 논문은 재료분야 권위 있는 대표적인 국제 학술지 ‘Advanced Functional Materials (IF = 15.621)’지 4월 최신호 표지논문(Inside Front Cover)으로 게재됐다. (논문제목: Enhanced Sensitivity of Iontronic Graphene Tactile Sensors Facilitated by Spreading of Ionic Liquid Pinned on Graphene Grid) 웨어러블 센서의 중요성이 증대되는 가운데
상호명(명칭) : (주)첨단 | 등록번호 : 서울,자00420 | 등록일자 : 2013년05월15일 | 제호 :헬로티(helloT) | 발행인 : 이종춘 | 편집인 : 김진희 |
본점 : 서울시 마포구 양화로 127, 3층, 지점 : 경기도 파주시 심학산로 10, 3층 | 발행일자 : 2012년 4월1일 | 청소년보호책임자 : 김유활 | 대표이사 : 이준원 | 사업자등록번호 : 118-81-03520 | 전화 : 02-3142-4151 | 팩스 : 02-338-3453 | 통신판매번호 : 제 2013-서울마포-1032호
copyright(c) HelloT all right reserved
UPDATE: 2025년 01월 13일 15시 17분













