[첨단 헬로티]
인더스트리4.0과 스마트 팩토리의 트렌드에 맞춰서 기존 다관절로봇의 단점인 공간 제약적인 부분과 설치 시간, 엔지니어링 비용 등을 줄이기 위한 대안으로 협업로봇이 적극적으로 검토되고 있다. 로봇 산업 시장 전망을 보더라도 최근 3년간 일반 다관절로봇 시장이 6~7% 성장한 데 비해 협업로봇은 15~25% 성장을 보였다. 협업로봇은 순수하게 협업을 위해 만들어진 로봇도 있지만, 안전 기능을 강화하여 사람과 같이 작업할 수 있는 기능을 갖춘 다관절로봇도 협업로봇이라고 불린다. 협업로봇의 또 다른 특성 중 하나가 모빌리티라는 점이다. 모빌리티 기능이 있는 협업로봇은 그때그때 생산라인이 바뀌더라도 적은 비용으로 설비가 가능하다. 협업로봇과 안전에 대해 지난 ‘로보틱스 컨퍼런스 2018’에서 ABB 코리아 이상호 부장이 발표한 강연 내용을 정리했다. [편집자 주]
왜 협업로봇인가
산업에서 협업로봇에 주목하는 이유는 크게 3가지이다. 첫째는 최저 임금이 올라감에 따라 전형적인 ROI 계산이 무의미해지고 있다. 로봇에 투자하면 2년 반에서 3년이면 ROI가 회수된다고 해서 로봇 도입을 검토했던 업체들이 더 이상은 ROI 때문에 투자하지 않는다. 지금은 제품의 품질을 일정하게 유지할 수 있고 숙련된 엔지니어들을 구하기 어렵기 때문에 로봇 투자를 한다.
둘째는 협업로봇은 중소 중견기업에서 훨씬 많은 이득을 볼 수 있다. 사실, 협업로봇은 빠른 속도를 요하는 대량생산 체제에서는 맞지 않는다. 왜냐하면, 협업로봇의 특성상 다관절로봇처럼 고속으로 운전할 수 없고 많은 다관절을 가진 로봇을 별도로 개발할 수 없기 때문이다. 협업용으로 디자인된 로봇은 제한된 속도와 제한된 다관절을 가지므로 빠른 속도를 요하는 대량생산 라인보다는 다품종 소량생산 체제에 적합하다.
결국, 인더스트리4.0 시대 협업로봇은 가장 큰 성장 동력 중 하나이다. 그 이유는 인더스트리4.0과 스마트 팩토리 구현을 위한 자동화 요구가 증가하고 있고, 정형화된 값비싼 로봇 솔루션 대신 바로 현장에서 작업자 공간만큼 차지하며 협업로봇이 그 기능을 대체할 수 있다면 설치 공간 절약이나 투자비 측면에서 훨씬 훌륭한 대안이 될 수 있기 때문이다.
셋째는 신제품의 라이프사이클이 짧아지고 있다. 일반 소비재 산업의 경우 제품 출시된 지 3~6개월 정도 되어 시장 반응이 없으면 바로 폐기된다. 이 짧은 기간의 자동화를 위해 대량 설비에 투자하는 기업은 없을 것이다. 그 경우에 모빌리티 기능이 있는 협업로봇을 적용하면 그때그때 생산라인이 바뀌더라도 적은 비용으로 설비가 가능하다. 중소 중견기업들 사이에서 그런 니즈로 협업로봇의 수요가 증가하고 있다.
협업로봇은 ‘대체’ 수단이 아닌 ‘공존’
협업로봇은 완전자동화가 아닌 수작업과 완전자동화의 중간 형태이다. 사람과 로봇이 공존해서 일할 수 있는 어떤 애플리케이션 영역이 있을 것으로 생각하고 이 영역에 맞는 로봇을 협업로봇이라고 말한다.
그런데 유럽에서 생각하는 협업로봇과 아시아에서 생각하는 협업로봇은 개념부터 다르다. 유럽은 처음부터 사람과 공존하는 작업을 선택했다. 즉, 사람이 어떤 작업을 하면 로봇이 그것을 이어받아 다음 작업을 하는 개념으로 접근했기 때문에 기존 생산성이 100이라면 협업로봇은 120~130%까지 올려준다. 반면, 한국을 비롯한 아시아에서는 협업로봇을 기존 다관절로봇처럼 사람을 대체하는 목적으로 검토했다.
우리나라 경우 과거 3년 동안을 보면, 사람을 빼고 협업로봇 1대를 집어넣으면 바로 작업할 수 있을 것으로 생각했다. 그런데 막상 협업로봇이 속도가 느리고 여러 가지 제약 조건이 있다 보니 사람 1명을 대체하려면 협업로봇 2~3대가 필요했다. 자연히 비용은 더 올라가게 되어 다시 기존 다관절로봇 도입을 검토하는 사례가 매우 많았다. 지금은 시장 환경이 변화하면서 사람과 로봇이 협업할 수 있는 환경을 만들려는 시도가 산업계 전반에서 일어나고 있다.
그런데 협업을 위해서는 안전 기능이 꼭 필요하다. 안전에 대한 요구가 늘어나면서 각종 안전 펜스, 안전 센서, 안전 도어에 대한 비용이 증가하고 있다. 협업로봇은 자체에 안전 기능이 있어 이러한 비용을 많이 줄일 수 있다고 생각되지만, 실제로는 안전 펜스나 안전 센서들을 설치해야 될 경우가 있다. 오작동이 충분히 일어날 수 있기 때문이다.
ISO 규정에서 협업로봇을 정의하고 있는 내용을 보면, 기존 다관절로봇처럼 안전 센서를 통해서 사람이 접근할 경우에는 로봇이 인터락이 걸려서 정지하는 사례가 있고, 비전카메라 센서로 속도를 인식해서 사람이 다가가면 로봇의 속도를 줄이거나 멈추고 범위에서 멀어지면 다시 작동하는 사례가 있다. 또한, 토프센서가 내장되어 있어 사람과 약간만 부딪쳐도 로봇이 자동으로 멈추는 이 기능을 협업작업이라고 정의하고 있다.
협업로봇의 개념은 2가지이다. 원천적으로 협업로봇으로 개발된 로봇을 협업로봇이라고 하지만, 기존 다관절로봇에 안전 기능을 넣은 로봇도 협업로봇이라고 한다. 그 이유는 기존 다관절로봇에 안전 기능을 넣어서 사람이 접근하면 로봇이 정지하거나 속도를 줄이는 부분도 IFR에서는 ‘협업 운영’(collaborative operation)으로 보고 있다. 즉, 다관절로봇 제조회사에서 이 기능을 넣으면 협업로봇이 된다.
안정 규정은 이렇다. 로봇이 사람 몸체에 닿았을 때 느끼는 고통의 정도를 체크해서 인계점 이전까지만 충격이 사람에게 전해지면 협업 운영이라고 나와 있다. 독일에서는 사람마다 로봇을 설치해 놓고 자극을 주어서 느끼는 고통을 표준화해서 소개하고 있다. 인체의 어떤 특정 부위에 조그마한 자극이라도 인계점이 넘으면 협업 운영이라고 할 수 없다.
위협을 느끼는 협업 운영에는 크게 4가지가 있다. 기존 다관절로봇처럼 펜스 없이 떨어져서 공존하는 부분, 동기화되는 부분, 서로 협력하는 부분, 공간만 나눌 뿐 실제로는 같이 작업하는 부분이 이에 해당한다.
위험성 평가는 필수
또 하나의 가장 중요한 부분은 어떤 형태의 협업로봇을 사용하더라도 반드시 리스크 어세스먼트라는 위험성 평가를 꼭 해야 한다. 유럽의 협업로봇에 대한 안전 규정에서 가장 큰 이슈는 협업로봇이 사람의 머리나 목에 접촉되는 충격에 대해서는 별도의 규정을 만들려고 하고 있다.

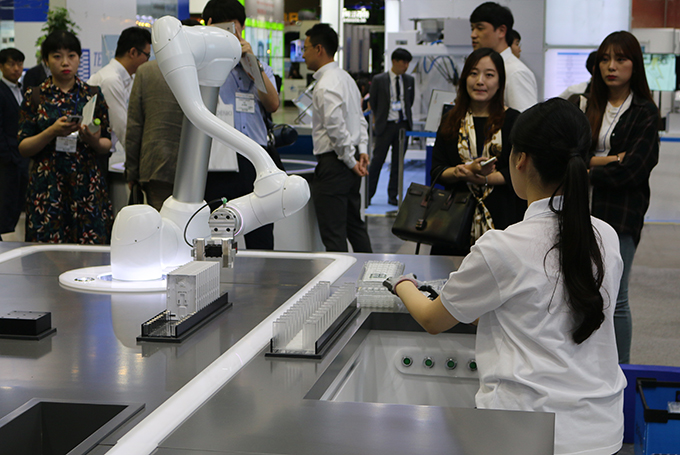
▲ ABB의 듀얼암 유미(YUMI)와 싱글암 유미(YUMI)
가령, ABB의 협업로봇인 ‘유미’(YUMI)일지라도 이 로봇이 낮게 설치되어 팔을 들다가 사람의 머리나 목을 치게 되는 상황이 연출되면 반드시 로봇 위에 안전 펜스를 설치해야 한다. ‘유미’를 아무리 진정한 협업로봇이라고 강조하더라도 애플리케이션이나 로봇 동작 범위가 사람에게 충격을 가하고 그 충격이 실제로 상해를 끼친다면 안전 기능을 반드시 추가해야 한다.
애플리케이션 사용하는 과정에서 발생하는 상해는 로봇 제조사의 책임이 아니다. 로봇 회사는 로봇 자체의 안전 기능이나 ISO 규정만 따를 뿐이지 책임은 없다. 그 부분은 전적으로 엔드유저나 시스템 설비업체에 귀책사유가 연결되기 때문에 협업로봇이라고 할지라도 리스크 어세스먼트를 한 다음에 위험성이 있다고 판단되면 리스크 감소를 실행해야 한다.