스카라 로봇은 로봇 본체와 제어기 그리고 티칭 펜던트로 구성이 되고 어떤 작업을 어떻게 할 것인가에 의해서 무엇을 더 사용하고 연결할 것인가를 결정하게 된다.
로봇의 대부분 작업은 제품을 집어서 놓는 역할을 하게 된다. 이것이 컨베이어가 움직이는 상태에서 제품을 집어서 트레이나 팔레트에 놓는다면 우선 로봇 제어기에 눈에 해당하는 비전 시스템을 연결하고 컨베이어의 속도 위치를 감지하기 위해서 엔코더를 연결해야 한다.
그리고 이런류의 작업이 로봇 한 대로 불가능한 경우는 비전시스템 1대에서 여러 대의 로봇 제어기에 연결해야 하므로, Ethernet HUB를 사용해서 비전의 데이터가 동시에 여러 대의 로봇에 데이터를 전송할 수 있어야 한다.
또한, 어떤 특별한 장치의 경우는 RS-232C만 연결이 가능한 경우가 있으므로 이런 경우는 시리얼 통신에 연결해야 하는 경우도 있다. 이처럼 로봇의 기본 구성과 하고자 하는 작업에 따라서 다양한 시스템의 구성이 가능하다.
지금부터 설명하는 것은 일반적으로 사용 가능한 응용 사례를 중심으로 시스템의 구성과 필요 요소를 소개한다.
로봇이 컨베이어의 동기 기능을 구현하는 데는 크게 나누면 센서로 트리거 동기 신호를 사용하는 경우와 카메라 등의 비전시스템으로부터 데이터를 주고받으면서 동기를 구현하는 방법으로 구분될 수 있다.
여기서 단순 컨베이어 동기 기능은 센서를 이용해서 제품의 위치를 동기시키고 그 동기 시점으로부터 로봇의 작업 반경 내에 도달하면 주어진 작업을 수행하는 것이다. 그림 1은 컨베이어의 제품은 연속적으로 이동하고 있고 작업을 해야 하는 워크를 트레이(팔레트)로부터 순차적으로 취출해서 삽입을 하는 공정이다.
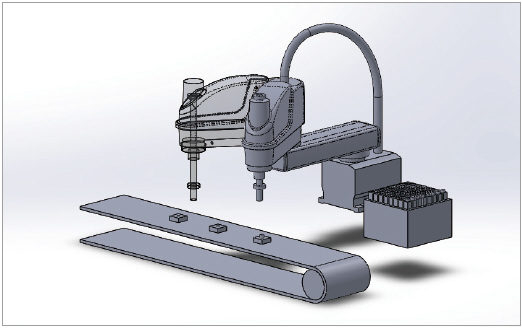
▲ 스카라 로봇이 컨베이어 동기 기능을 구현하는 모습의 예.
이 경우에 스토퍼를 두고 고정된 위치에 로봇이 삽입을 하는 것도 가능하지만, 컨베이어상의 동기 신호를 이용해서 위치를 추적하면서 삽입을 이동 중에 할 수 있도록 구성된 시스템이다. 위치를 고정시키고 작업하는 것과 연속적으로 이동하면서 작업하는 것은 단위 시간당 처리량에서 월등한 차이가 난다. 생산성 향상을 위해서는 움직이는 상태를 유지하면서 작업을 하는 것이 좋으나 대체로 정밀도가 떨어진다.
이 작업을 하는 로봇은 대표적인 것이 스카라 로봇이고 스파이더 로봇도 이 작업을 주로 수행한다. 가장 큰 차이점은 가성비이다. 대체로 같은 수량을 처리하는 기준으로 본다면 스카라 로봇을 사용하는 경우보다 스파이더 로봇이 2배 정도 가격이 비싸게 구현된다(저자의 단순한 비교이므로 향후 저가의 스파이더 로봇이 나온다면 다를 수도 있다. 하지만 지금은 대체로 이런 정도의 가격 수준이다).
적용되고 있는 분야는 부품의 조립 공정, 화장품 케이스 조립, 화장품 포장, 영양제 포장 등의 여러 분야에 적용이 되고 있으며 비전과 같이 사용되는 경우가 일반적이기는 하지만, 센서에 의한 트리거 신호를 사용하는 경우도 가능하다. 참고로, 유튜브 검색창에서 ‘엑트엔지니어링’을 검색하면 더 많은 적용사례를 확인할 수 있다.
최영수 엑트엔지니어링 대표