[첨단 헬로티]
비선형 칼만 필터로 반작용 휠 상태 정밀 추정 가능해져
과제 추진 배경

오늘날 마이크로 위성은 지구 궤도에 보편적으로 적용 가능한 플랫폼으로서 산불이나 쓰나미 조기경보 시스템 등 다양하고 복잡한 작업을 수행한다. 이런 ‘하이테크 장치’의 최적 기능을 위한 전제조건은 정확하고 신뢰할 수 있는 위치제어시스템 개발이다. 이러한 제어시스템의 오류는 인공위성의 전체 손실과 전체 사명 실패로 이어질 가능성이 높다.
협력 프로젝트에 참여한 Astro-und Feinwerk-technik Adlershof GmbH와 Magson GmbH 그리고 Lausitz 대학의 Prof. Dr.-Ing. Matthias Ziegenhorn 교수와 그의 연구팀은 ZIM협력 프로그램을 통해 연방 경제기술부로부터 2010년 12월까지 48만1,002유로를 지원받았으며, 마이크로 위성 애플리케이션을 위해 특수 액추에이터를 개발함으로써 위치제어시스템의 신뢰성과 정확성을 크게 향상시키고자 한다.
개발제품과 기술혁신
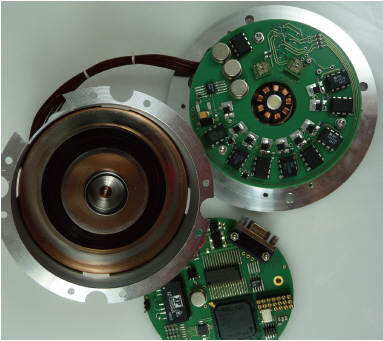
이 프로젝트의 목표는 다양한 위성 위치제어시스템에서 고정밀 액추에이터로 사용될 수 있는 무게범위 10~60kg의 위성을 위한 ‘지능형’ 반작용 휠(reaction wheel 또는 모멘텀 휠)을 개발하는 것이다. 알고리즘의 기본은 반작용 휠의 현재 시스템 상태(각도 및 회전속도)를 매우 정확하게 추정하는 것이다. 이 추정은 수학 필터, 소위 비선형 칼만 필터의 도움으로 실현된다. 위치지어시스템은 목표지점으로 반작용 휠에 속도 또는 가속도를 제공함으로써 위성의 정확한 정렬을 가능하게 한다.
새로운 반작용 휠에는 매우 높은 트레드(주행 안정성), 가속도 및 속도의 정확한 구현, 플러그 앤 플레이(Plug & Play) 기능을 통한 높은 사용자 편의성 기능이 있다.
시장과 고객
플러그 앤 플레이(Plug & Play) 및 자율 제어기술을 통한 위치제어시스템의 전체 설계에 대한 반작용 휠의 우수한 통합기능은 고유한 장점이다. 반작용 휠의 분배는 프로젝트에 참여한 두 회사를 통해 이루어지며, 나노 및 마이크로 위성에 대한 수요가 늘어남에 따라 새로운 위치제어시스템에 대한 시장 기회가 급부상하고 있다.
* 본 기술은 최근 독일연방 경제에너지부(BMWi)가 선정한 우수 중소·중견기업 기술혁신 과제들로 한국산업기술평가관리원(KEIT)이 엮은 것을 옮겼다.