오늘날의 자동차에서 첨단운전자지원시스템(ADAS)을 탑재하고 자율주행차로 이행하는 데에는 여러 단계가 있다. 자동차 업계는 이미 첫 번째 단계인 부분적 자율 주행에 도달했지만, 완전 자율주행차는 2025년 이후나 돼야 가능할 것으로 예상된다.
적응형 순항 제어(ACC), 자동 제동 및 주차 지원과 같은 기능들이 이미 탑재되고 있지만, 완전 자율주행차 구현을 위해서는 많은 기술적 혁신 뿐만 아니라 적합한 법제도 환경 조성을 필요로 한다. 이 글은 반도체 관점에서 완전 자율주행차 구현에 필요한 여러 단계들을 설명하고, 관련된 시스템 요구사항과 커넥티드 차량의 보안 측면을 함께 살펴볼 것이다.

국제자동차공학회(SAE)는 차량 자율주행을 6단계로 구분하고 있다. 독일 자동차산업협회(VDA)는 유사한 분류를 정의하고 있으며, 이 밖에 차량의 자율주행 단계에 대한 다른 정의들도 광범위하게 시행되고 있다. 예를 들어 미국의 도로교통안전국(NHTSA)에서는 6가지 분류 대신 5가지 단계로 구분한다.

모든 운전 기능을 운전자가 수행하는 차량으로부터 완전히 자동적으로 운전하는 시스템까지 일련의 발전은 각각의 자율주행 레벨에 따라 단계별로 실현된다(그림 1). SAE에 따르면, 레벨 0은 운전자가 전적으로 모든 조작을 제어한다. 레벨 1은 운전자 지원 시스템이 탑재되는 것이 특징이다. 레벨 1은 이미 운전자 지원 시스템에서 특정한 운전 모드를 실행함으로써 시행되고 있다. 적응형 순항 제어(ACC)와 자동 제동은 레벨 1의 대표적인 예다. 이러한 종류의 시스템은 운전 환경 주변의 정보를 사용하면서 스티어링 또는 가속 및 감속을 실행하지만, 운전자는 여전히 동적인 운전 조작의 나머지 모든 측면을 수행한다. 레벨 2(부분적 자율 주행)는 스티어링과 가속 및 감속을 둘다 갖춘 특정한 운전 모드를 실행한다. 레벨 2는 오늘날 자동차에서 이미 주차 지원 시스템, ACC 및 차선유지 제어 기능으로 구현되고 있다. 레벨 0에서 2까지는 운전자가 여전히 운전 환경을 모니터링하면서 원하는 경우 자동차를 완전히 제어할 수 있다.
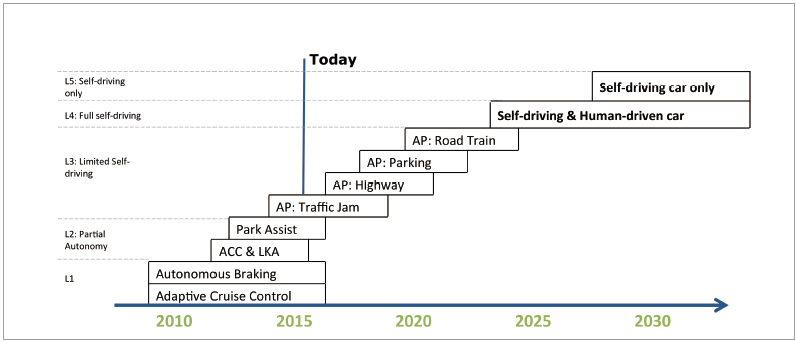
▲ 그림 1. 자동운전 등급에 기반한 자율주행 레벨 단계
레벨 2 이상에서 자율주행 시스템은 운전 환경을 모니터링하면서 운전자의 행동에 간섭하거나 심지어 특정 조작이나 행동에 대해 자동차 제어를 맡는다. 레벨 3(조건부 자동운전)에 도달하면 자율주행 시스템은 동적 운전 조작의 모든 측면을 제어하지만, 운전자의 개입을 요청하면 운전자가 적절히 이에 대처할 수 있는 단계다. 이와 같이 고도로 자동적인 레벨에서도 여전히 운전자가 차량 제어를 넘겨받을 수 있다. 하지만 교통 혼잡 제어, 고속도로 운전, 자동 주차, 로드 트레인과 같은 적용에 있어 레벨 3에 도달하는 것은 쉽지 않은 도전 과제다.
레벨 4(고도 자동운전)에서는 운전자가 즉시 대처할 필요없는 고도의 자율주행 시스템에 도달한다. 다음으로 레벨 5(완전 자율주행)에서는 완전히 자율주행 시스템이 현재 운전자가 관리하는 모든 도로 및 환경 조건에서 동적 운전 조작의 모든 측면을 떠맡는다.
시장
시장조사기관 IHS오토모티브의 최신 보고서 ‘현실로 다가온 자율주행, 문제는 시기’에 따르면, 다양한 자동차 제조업체들이 자율주행차를 목표로 적극적으로 움직이면서 투자를 증대하고 있는 것으로 나타났다.
OEM은 자율주행 기술이 향상됨에 따라 운전자 지원 시스템을 확대하고 점점 더 많은 자율 기능을 추가하고 있다. 이러한 현상은 2035년에 전세계 자율주행차의 연간 판매 대수가 1,200만 대에 달할 것이라는 IHS오토모티브의 예측에 힘을 실어준다. 또한 오늘날 도로를 달리는 거의 모든 차량이 2050년 후 어느 시점이 되면 일정 수준의 자율주행 자동차 또는 자율주행 상용차량으로 대체될 것이라는 장기 전망을 내놓았다.
이러한 개발을 지원하기 위해 2014년에는 자율주행차를 위한 많은 테스트 규정이 마련됐다. 자동차 제조업체들은 이에 대처하기 위한 노력으로 산업 기관, 공급 업체, 대학 연구기관들과 협력하고 있다.
IHS오토모티브는 2025년에는 저속 레벨 5 자율주행차의 보급이 확대되고, 2030년에는 모든 속도의 레벨 5 자율주행차가 본격적으로 도입될 것으로 내다봤다.
요구사항
자율주행차로 이행하는 과정에서 보다 높은 단계에 도달하려면 많은 개발이 필요하다. 일반적으로 자동차는 기존 ECU 방식에 비해 도메인 구조를 갖는 새로운 전자장치 아키텍처를 필요로 한다. 이러한 새로운 아키텍처는 고속의 내부 데이터 버스 시스템에 의해 지원돼야 한다. 안전한 동작을 보장하려면 기술과 시스템에서 높은 리던던시를 구현해야 한다. 이밖에 자율주행차는 다양한 종류의 기존 및 새로운 센서를 필요로 한다. 증가하는 데이터 양을 처리하려면 컴퓨팅 성능의 증가도 필수적이다. 또한 보안 게이트웨이를 갖춘 안전한 차량간(V2V) 통신을 통해 도로 조건, 교통 상황 등에 관한 정보를 최신 정보로 갱신해야 한다. 이러한 외부 커넥티비티는 차량 기능의 필드 내 업그레이드를 가능하게 한다. 이에 더해 운전자의 상태를 관찰하는 혁신적 기술을 갖출 필요가 있다. 또한 여기에는 여전히 더 많은 학습이 필요하다.
그러나 기술 개발만으로는 충분하지 않다. 기존 규정의 실행을 보류하고 폐기하는 규정은 또 다른 과제다. 기초적인 규제 걸림돌 중 하나는 1968 비엔나 협약(Vienna Convention)이다. 조항 8 ‘모든 이동하는 차량 또는 결합 차량은 운전자가 있어야 한다’ 및 조항 13 ‘차량의 모든 운전자는 모든 환경에서 자신의 차량을 통제해야 한다’에 따르면, 실제적으로 사람과 재화를 운송하는데 있어 고도로 자율적인 운전의 구현을 허용하는 법률적 기반이 없으며, 오직 시스템에 의해 지원되거나 부분적 자율운전만 이러한 규약에 부합할 수 있을 뿐이다. 이 규약은 거의 모든 EU 국가의 도로 법에서 시행되고 있다.
자율주행 기술이 빠르게 발전하면서 2014년 3월 비엔나 협약 8항이 수정됐다. 새로운 개정에 따르면, 여전히 운전자가 차량에 탑승해야 하고 언제라도 스티어링 휠을 넘겨받아 제어할 수 있어야 한다. 한편, 개정 조항은 ‘운전자가 시스템에 대해 우선권을 갖고 작동을 중단할 수 있는 한’ 자동차가 스스로 운전하는 것을 허용하고 있다. 이러한 수정은 자율주행차를 실제로 적용할 수 있게 하는 중요한 진전을 의미하지만, 여전히 고속도로에서 차량의 자율주행을 적용하기 위해서는 조정해야 할 법적 걸림돌이 있다.
빌딩블록
자율주행 시스템을 구현하는 데에는 여러 가지 다양한 빌딩블록이 필요하다. 차량의 동적 특성과 제어의 필요성은 제동, 스티어링, 가속, 서스펜션, 트랜스미션 등에서 혁신적 솔루션을 필요로 한다. 또한 자율주행차는 리던던트 센서와 센서 기술 뿐만 아니라 실시간으로 모든 정보를 관리하기 위해 현재의 자동차보다 몇배 더 높은 컴퓨팅 성능을 필요로 한다. 관련 자동차 센서에는 레이더, 초음파 센서, 카메라, 레이저, GPS, 맵 시스템 등이 포함된다. 센서 데이터는 중앙에서 계산하도록 수집, 병합, 전송돼야 한다. 뿐만 아니라 외부 커넥티비티는 환경과 안전한 통신을 구현하는 핵심이다. 이것은 단거리 전용 통신(DSRC), 와이파이 또는 셀룰러 채널을 통해 수행할 수 있다. 이러한 모든 기능에 더해 강력한 데이터 처리 기능과 의사 결정 기능이 모두 탑재돼야 한다.
더 높은 수준의 자율주행 시스템에 도달하려면 두 가지 주요 단계가 수행돼야 한다. 오늘날의 일반적인 운전자 지원 시스템이 카메라, 레이더 등으로부터 데이터를 수집하고, 전용 알고리즘이 탑재된 관련 ECU를 사용해 전용 기능을 위한 데이터를 처리한다. 그 결과는 디스플레이되거나 특정 작동의 제어에 이용된다. 자율주행 시스템을 구현하려면 자동차는 항상 자동차 주위의 환경에 대해 ‘그림’을 유지하고 있어야 한다. 그것은 운전자가 무엇을 하고 있는지, 그리고 자동차의 상태 모델은 어떠한지를 나타내는 ‘그림’이다. 이를 위해 센서 데이터 융합과 리던던시로 구성되는 제어 장치 및 알고리즘 필요하다.
2단계 자율주행차를 둘러싼 ‘안전 코쿤’(그림 2)이 레이더, 카메라, 초음파 및 레이저 센서를 기반으로 개발돼야 한다. 이것은 차선이탈 경고장치(LDW), 차선유지 보조장치(LKW), 전방 충돌 경고장치(FCW), 사각지대 검출(BSD), 상향등 보조장치(HBA), 교통신호 인식(TSR), 후방 카메라(BUA) 등과 같은 기능을 구현해야 한다.
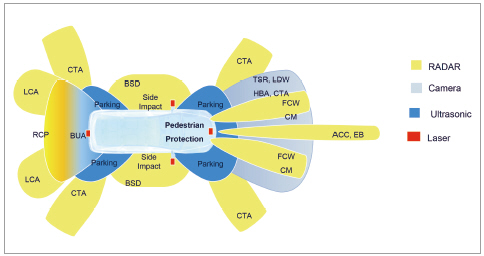
▲ 그림 2. 센서를 통한 안전 코쿤
오늘날의 객체 지향 융합 시스템으로부터 그리드 기반 융합(네트워크)으로 전환하려면 일부 까다로운 시스템 요구사항을 갖춰야 한다. 하이엔드 멀티코어 CPU는 안전 가드 MCU가 탑재된 매트릭스 GPU로 대체해야 하며, 현재 수 MB로 충분한 메모리 용량은 향후에는 그리드 히스토리 자체만으로도 약 200MB에서 500MB가 필요하며, 소프트웨어 알고리즘(매트릭스 기반과 부동 소수점)은 추가로 80MB에서 160MB가 필요하다. 뿐만 아니라 컴퓨팅 성능은 최대 8,000DMIPS 이상으로 증가할 것이다.
안전과 보안
자율주행차로 나아가기 위해서는 고장시 안전(fail-safe)으로부터 고장시 안전 동작(fail-operation) 시스템으로 이행해야 한다. 이것은 시스템 설계에서 높은 수준의 리던던시를 구현하는 것을 의미한다. 모든 안전 관련 기능은 전원장치와 통신 네트워크를 포함해 리던던시 구성을 해야 한다. 다른 안전 측면들로는 높은 분산화, 신속한 고장 내성, 자기 모니터링 장치, 멀티코어 MCU, 워치독 감지, 그리고 마지막으로 ASIL D 지원 운영 시스템 및 기능을 들 수 있는데, 이는 단지 일부에 불과하다.
자동차와 주변 환경 간의 증가하는 공생은 차량의 경계를 넘어 많은 기회를 제공한다. 차량간(V2V) 및 차량과 인프라간(V2I) 통신과 같은 새로운 기술은 자율주행차를 강력하게 지원한다. 장점은 명백하다. 증가하는 운전자 편의성 외에도 이러한 기술이 보급되면 교통사고 사망자를 최대 90%까지 예방할 수 있을 것으로 추산되며, 환경적인 정보는 운전 전략을 향상시키고, 그에 따라 연료 소비를 감소시킨다. 자동차에 대한 영구적인 무선 액세스는 새로운 사업 모델의 가능성을 열어준다. 일례로 원격 소프트웨어 업데이트를 제공해 많은 비용이 드는 리콜을 최소화할 수 있다. 그러나 동시에 외부에서 자동차에 액세스할 수 있는 가능성은 모바일폰, 블루투스 또는 와이파이 등을 통해 해커 공격의 위험(그림 3)을 증가시킬 수 있다.
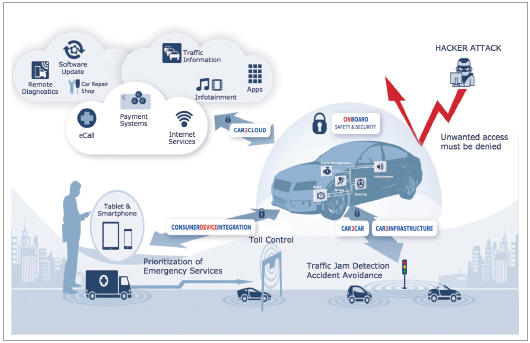
▲ 그림 3. 커넥티드카는 온보드 안전과 보안 기능을 필요로 한다.
V2V 및 V2I 통신은 미래에 도로 안전과 교통 효율을 향상시키는 데 기여할 것이다. 예를 들어, 운전자는 전방의 도로 파손이나 자동차 사고에 대해 미리 경보를 받을 수 있다. 위치와 속도와 같은 민감한 정보의 교환이 요구되지만, 미래의 자동차는 이러한 정보를 이용해 경고를 내보내고 자동적인 반응을 발생시키기 때문에 이와 같은 데이터의 무결성은 반드시 보호돼야 한다. 이밖에 운전자의 사생활 보호 문제 또한 중요하다. 이것은 많은 장소와 자동차의 인터페이스에서 높은 수준의 보안을 요구한다.
온보드 통신을 위한 보안 솔루션은 안전해야 하고, 최소의 데이터 오버헤드와 비용으로 실시간 제약과 기존 버스 표준을 준수해야 할 필요가 있다.
온보드 보안과 안전한 통신은 두 가지 위협에 대처해야 한다. 하나는 하드웨어와 소프트웨어의 조작에 대한 위협이다. 예를 들면, 튜닝 목적 또는 유해한 하드웨어 구성요소나 소프트웨어를 이용해 원래 보장되고 정의된 기능을 이행하지 못하도록 하는 일종의 조작이 있을 수 있다. 다른 위협으로는 테러 또는 사이버 전쟁이 있다. 이 경우 공격자는 성공적으로 ECU(Electric Control Unit)를 장악해 버스의 메시지를 전송 또는 조작하고, 정의된 기능을 방해 또는 교란해 사람에게 피해를 입히거나 간단히 자동차를 훔칠 수도 있다.
혁신적 반도체 솔루션은 자동차 보안 시스템을 설치할 수 있도록 한다. 이러한 종류의 보안 시스템은 글로벌 시장에서 사용자와 자동차 OEM, 자산, 개인 데이터, 그리고 마지막으로 무엇보다 도로 위의 사용자 생명과 몸을 보호한다.
요약
자율 및 협력 주행은 운전자에게 새로운 개념의 자동차와 운전을 가져다 준다. 자동차 업계는 완전 자율주행차로 나아가고 있다. 첫 번째 단계는 이미 도달했지만, 여전히 모든 까다로운 요구사항을 이행해야 하는 많은 과제가 남아있다. 혁신적 반도체와 소프트웨어 솔루션은 자율주행차 구현을 위한 핵심 기술이다.
한스 아들코퍼(Hans Adlkofer)
인피니언 테크놀로지스 자동차 시스템 그룹 부사장