[헬로티]
협업로봇이 제 역할을 하기 위해서는 무엇보다 안전성을 제공할 수 있어야 한다. 로봇이 사람과 함께 작업하다 보면 충돌과 같은 잠재적인 위험이 늘 있기 때문이다. 협업로봇을 제조하는 유니버설로봇은 잠재적 리스크를 최소화한 UR 시리즈를 통해 로봇이 어떻게 사람과 안전하게 협업할 수 있는지를 잘 보여주고 있다.
유니버설로봇에서 제공하는 협업로봇은 ISO/TS 15066을 준수하는 안전 기능을 갖추고 있어, 사람과 나란히 협력하거나 독자적으로 작업할 때 안전하고 정확하게 작동할 수 있도록 설계되어 있다. 유니버설로봇의 사례를 들어 자세히 살핀다.


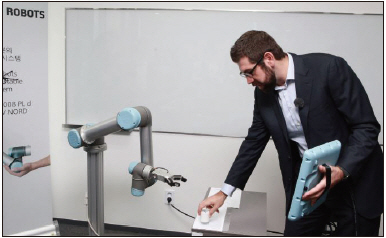
▲앤드류 피터 유니버설로봇 APAC지사 기술지원 총괄책임자가 UR 안전기술과 UR 플러스에 대해 소개하고 있다.
UR 협업로봇의 기술적인 특징
협업로봇의 가장 큰 이슈 중 하나가 휀스 없이 어떻게 안전하게 구동할 수 있느냐이다. 이에 대해서는 3가지로 얘기해 볼 수 있다.
첫째, 리스크 평가이다. 유니버설로봇 제품의 리스크 평가는 여러 리소스가 있는데, 그중 대표적인 것이 3개의 ISO 문서이다. 먼저, ISO 12100은 일반적인 리스크를 평가하는 것으로 시스템이나 상황에서 전체적인 리스크를 감소하는 방안에 대한 문서이다. 그리고 리스크 평가 보고서를 어떻게 포맷팅해야 하는지도 나와 있다.
ISO 10218-2는 산업용 로봇의 전반적인 안전성에 관한 문서이고 인터그레이터들이 사용하기 위한 지침이었지만, 이 문서는 15년이 됐기 때문에 협업로봇과 같은 신생 기술과는 연관성이 떨어진다. 그래서 협업로봇을 위한 ISO/TS 15066이 나왔다.
여기서 협업로봇을 잠깐 정의하면, 협업로봇이란 경량로봇으로 인간과 함께 작업하기에 안전한 로봇이며, 손쉽게 프로그래밍할 수 있는 인터페이스를 가지고 있는 로봇이다. ISO/TS 15066 문서는 세이프티 센싱 없이 로봇을 어떻게 안전하게 사용할 수 있는지에 대한 내용이 나와 있다.
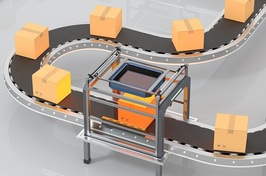
그러면 ISO/TS 15066은 리스크 평가하는데 어떤 도움을 주는가? 문서에 나와 있는 로봇의 업무 공간 배치를 보면, 적색구역과 녹색구역이 있다. 적색구역은 로봇이 독립적으로 활동하는 구역으로, 사람과 충돌이 없기 때문에 빠른 속도로 작업할 수 있는 공간이다. 안전성을 고려해야 하는 부분은 사람과 로봇이 협업하고 있는 녹색구역이다. 잠재 리스크를 평가해서 이 구역에서 어떻게 하면 사람에게 안전성을 제공할 수 있는지 프로그래밍하게 된다.
▲ UR5를 작동하여 원통의 물체를 바스켓에 옮겨 담는 ‘픽 앤 플레이스
(Pick and Place)’ 시연 모습.
이 문서는 또 사람과 로봇이 충돌했을 때 얼마만큼의 힘과 속도가 적절한지에 대한 내용도 담고 있다. 예를 들어, 힘이 강하더라도 짧은 시간 동안 힘이 가해지면 큰 상해는 입지 않는다. 그리고 신체 영역에서도 어깨에 충돌하면 상해가 크지 않지만, 머리에 충돌하면 정도는 훨씬 더 심각해질 것이다. 이런 부분에 대한 고려들을 문서에 나와 있는 지침을 참고할 수 있다. ISO 문서 외에도 리스크 평가를 간소화한 산정회사들의 지침도 참고하는 것도 도움이 된다.
둘째, 잠재 리스크를 파악한 다음에는 유니버설로봇의 안전 시스템으로 들어와서 시스템을 구성할 수 있다. 안전 시스템 구성하는 데에는 2가지 중요한 부분이 있는데, 최고 속력과 충돌력을 설정하는 것이다. 최고 힘을 설정한다는 것은 로봇이 사람이나 물체에 충돌할지라도 최고의 특정 힘 이상으로 충돌하지 않는다는 것을 의미한다. 그리고 안전성 시스템에서는 업무 공간의 경계를 설정해서 사람과 같이 작업하는 공간에서는 움직임의 제약을 두고, 그렇지 않은 곳은 로봇이 훨씬 더 자유롭게 움직일 수 있도록 설정할 수 있다.
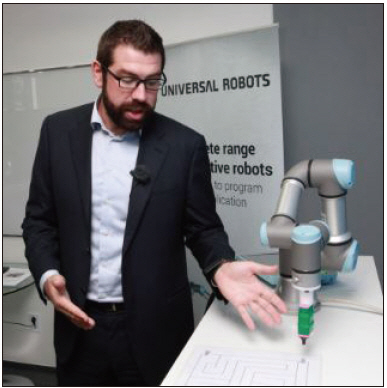
▲UR3를 움직이며 종이 위해 그려진 미로를 빠져 나오는 ‘미로 찾기’ 시연 모습. 본드 칠이나 스프레이 등 일정한 속도를 유지하는 것이 중요한 공정에 적용할 수 있다.
셋째, 추가적인 안전장비 사용이다. 어떤 상황에서는 속도와 힘을 아무리 제한하더라도 충분히 안전하지 않을 수도 있는데, 그럴 땐 안전장비를 추가하여 사용할 수 있다. 유니버설로봇은 안전 PLC와 매우 유사한 인터페이스 기능의 컨트롤러가 있어 안전 디바이스와 직접 연결이 가능하다. 그러므로 애플리케이션에 따라 시스템을 구성해서 작업하는 사람의 안전성을 제고할 수 있다.
UR+, ‘플러그 앤 플레이’로 사용자 편리 제공
유니버설로봇 플러스(UR+)는 로봇 본체에 연결하면 바로 사용할 수 있는 플러그 앤 플레이(Plug & Play) 애플리케이션 솔루션의 쇼룸으로, 유니버설로봇에 적용될 애플리케이션 개발자와 사용자 모두에게 필요한 시스템이다.
유니버설로봇 플러스는 크게 2가지 특징으로 제공된다. 첫째는 개발자들을 위한 +YOU(플러스 유)이다. 개발자 프로그램이라고 하는 +YOU는 무료이고 소프트웨어에 개발 툴킷을 제공함으로써 유니버설로봇 소프트웨어에 플러그인할 수 있는 프로그램을 만들 수 있다.
둘째는 개발이 완료된 결과물은 유니버설로봇에 제공해서 인증을 받을 수 있다. 애플리케이션 인증을 받은 다음에는 디지털 쇼룸에 올라가게 되고, 엔드유저들과 유통사들이 검증된 애플리케이션을 보내서 사용할 수 있다. UR과 관련된 액세서리 애플리케이션을 개발자와 직접 연결해서 직접 거래할 수 있도록 하는 플랫폼이 제공된다.
유니버설로봇이 이러한 플랫폼을 만든 가장 큰 이유는 검증된 솔루션을 제공함으로써 부가가치를 높이기 위해서다. 유니버설로봇 플러스를 활용함으로써 사용자들은 개발자들이 이미 개발한 것들을 개발하지 않아도 된다. 또한, 유니버설로봇으로부터 검증되고 테스팅 됐기 때문에 훨씬 안전하게 사용할 수 있고, 로봇을 설치하고 구현할 대 추가 비용을 절감할 수 있다.
유니버설로봇은 이와 관련, 테크니컬 워크숍을 최근 열었다. 이날 행사는 유니버설로봇 APAC지사 기술지원 총괄책임자인 앤드류 피터의 ‘UR 안전기술 및 UR 플러스’에 대한 소개와 직접 체험해 볼 수 있는 ‘핸즈 온 세션’으로 진행됐다.
임근난 기자 (fa@hellot.mediaon.co.kr)