최근 반도체 소재의 반송에서 고집적화에 따른 반송 워크의 박형화(薄型化)와 특수 소재가 증가하는 경향이 있다. 워크(소재)의 비용이 상승함에 따라 생산 과정에서 반송 로봇의 정밀도와 동작 향상의 필요성이 요구되고 있다. 또한, 다운타임(Downtime)에 대한 로봇 가동 재개 시간과 관리 및 유지 시간을 단축하는 경향으로 바뀌고 있다.
개발 배경
기존 ‘open loop driver’가 탑재된 로봇은 몇 가지 개량해야 할 과제를 가지고 있었다. 부하 변동 등 허용을 조금이라도 넘으면, 편차 이상으로 인한 ‘탈조(脫調)’ 현상이 발생한다. 편차와 관계없이 일정한 전류를 모터에 계속 흐르게 해야 하고, 서보보다 발열량이 많으므로 발열 대책이 필요하다. 따라서 동작 성능을 높이고 전력 절약화를 실현하기 위해 ‘서보 에뮬레이션(SVE) 컨트롤’을 탑재한 ‘closed loop robot’을 선보이게 되었다.

서보 에뮬레이션 컨트롤 로봇의 특징
스테핑 모터(Stepping Motor)이면서 서보 모터(Servo Motor) 제어방식과 유사한 드라이버 컨트롤이 가능하다. 기존 ‘open loop driver’와 비교해 다음과 같은 우수한 특성이 있다.

▲ 사진 1. JEL의 Wafer 핸들링 시스템
1. 부드러운 동작
(1) 탈조 없음
편차 피드백 제어(closed loop 제어)로 탈조 억제 기능이 향상되기 때문에, 과부하 시 즉시 피드백 제어에 의한 위치 보정을 한다. 따라서 급격한 부하 변동, 급가속에서도 운전을 지속할 수 있다.
(2) 모터 발열온도 상승 억제
서보 모터 제어방식에 접근한 피드백 제어로 필요 이상 전류를 흘리지 않기 때문에, 모터의 발열 온도를 억눌러 온도에 의한 부하 손상을 억제한다.
표 1은 서보 에뮬레이션(SVE) 컨트롤 ON, OFF(open loop 제어 시)의 차이에 의한 로봇 각 축의 온도 특성이다.
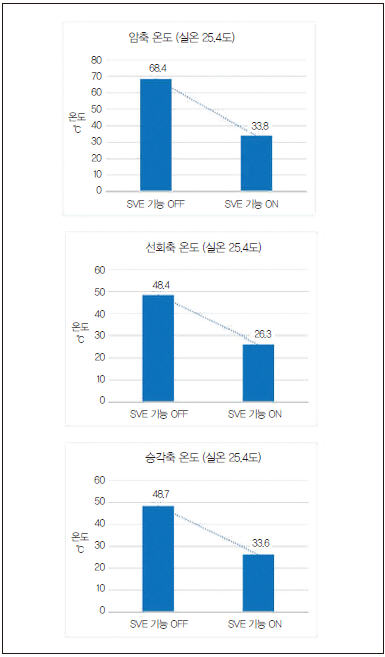
▲ 표 1. 로봇 각 축 온도 비교
2. 부가 신기능 및 특성
JEL이 채용한 ‘closed loop driver’에는 서보 에뮬레이션(SVE) 컨트롤 외 다음의 기능을 탑재하고 있다.
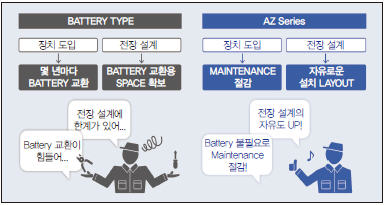
(1) 배터리 불필요
기계식 다회전 ‘absolute 센서(Encoder)’를 탑재해 관리되고 있으므로 전원을 꺼도 위치 정보를 유지할 수 있다. 따라서 기존의 위치 정보를 전기적으로 기억하기 위한 배터리는 불필요하다.
① 유지보수 시간/비용 절감 : 배터리 교환이 불필요하므로, 유지보수 시간과 비용을 절감할 수 있다. 또한, 외부 센서 없이 원점 복귀가 가능하므로 외부 센서 교환을 위한 공간 확보 등 공간이 절약되는 장점이 있다.
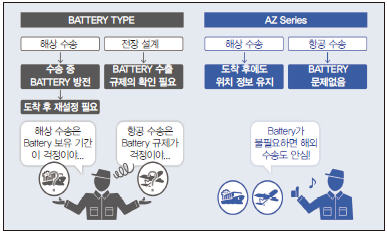
② 해외 수송 원활 : 배터리가 제품에 탑재되어 있지 않기 때문에, 수출 시 각종 규제 등을 고려할 필요가 없다.
(2) 모터 회전 시의 진동 감소
스테핑 모터는 연속적인 스텝 움직임으로 회전하고 있다. 그 스텝상의 움직임 하나를 본 것이 표 2의 1스텝 응답이다.
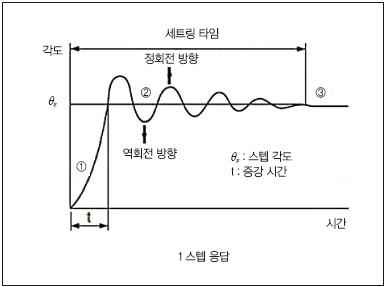
▲ 표 2. 스텝 응답도
① 정지 상태의 스테핑 모터에 1펄스를 입력하면, 다음 스텝 각도를 향해 가속한다.
② 가속한 모터는 스텝 각도를 통과해 오버슈트한 뒤 반대 방향으로 되돌아온다.
③ 이렇게 감쇠 진동한 후 스텝 각도의 위치에서 정지한다. 이러한 감쇠 진동을 발생시키는 스텝장의 움직임이 저속 시 진동의 원인이 된다.
서보 에뮬레이션(SVE) 컨트롤로 위 스텝 각도를 전기적으로 세분화시켜 저속 영역에서의 단계적인 움직임을 매끄럽게 한다. 또한, 피드백 전류 제어를 융합시킴으로써 원활한 동작(진동 감소+저소음 운전)을 실현하고 있다. 그 결과, 로봇 동작 시 워크 반송 레벨에서 진동 감소 효과를 확인할 수 있다. 표 3은 서보 에뮬레이션(SVE)을 각각 ON, OFF (open loop 제어)해 로봇 축을 동작했을 때 척에서 측정한 가속도를 비교한 데이터다.
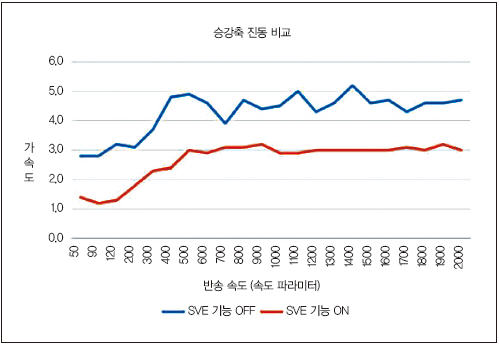
▲ 표 3. 서보 에뮬레이션(SVE) ON, OFF 시 척에서 측정한 가속도 특성
(3) 이력 기록 성능의 강화
기존형은 휘발성 메모리 ‘SRAM(Static·Random·Access·Memory)’를 적용했으나, 이번에는 비휘발성 메모리를 적용해 갑작스러운 전원 차단에도 에러, 지령 등의 이력을 유지하는 기능을 추가했다. 이로써 전원이 차단된 경우에도 차단 전의 상태를 파악할 수 있으므로 생산 현장에서 문제점 해석 시간을 단축할 수 있다.
3. 적용 사례
JEL의 표준 로봇은 아래의 Variation 전개를 하고 있다.
① 대상 반송 워크: 2inch부터 300mm의 실리콘 웨이퍼 외 다양한 사이즈 및 형상 반송 워크에 대응
② 암 길이:210mm(GCR type), 100mm, 130mm, 160mm, 200mm (SCR/STCR type)
③ 선회 각도:340도
④ 승강축 스트로크:200mm, 300mm, 400mm, 500mm
⑤ ‘베르누이 척’도 옵션으로 탑재 가능. < 자료 : 인아오리엔탈모터, JEL(일본) 기술연구소 >

▲ 사진 2. 탑재로봇 예
정리 : 임근난 기자 (fa@hellot.mediaon.co.kr)